 UAVレーザ
UAVレーザ 壁のズレを直す手順 範囲を固定して改悪を防ぐ(第2回)
壁のズレを直す際に、直したつもりで別の場所が悪化する事態を防ぐ手順を整理します。評価する範囲を固定し、比較可能な形で合わせ直す考え方をまとめます。
UAVレーザ  UAVレーザ
UAVレーザ  MBES
MBES 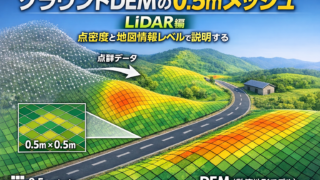 UAVレーザ
UAVレーザ  点群QC
点群QC  点群QC
点群QC  点群QC
点群QC  点群QC
点群QC