はじめに
港湾や沿岸の測量では、水中部はMBES、気中部はレーザで取りたい場面がよくあります。
特に護岸や法面、干潮時に露出する地盤まで含めて、できるだけ連続した地形を把握したい現場では、その要求は自然です。
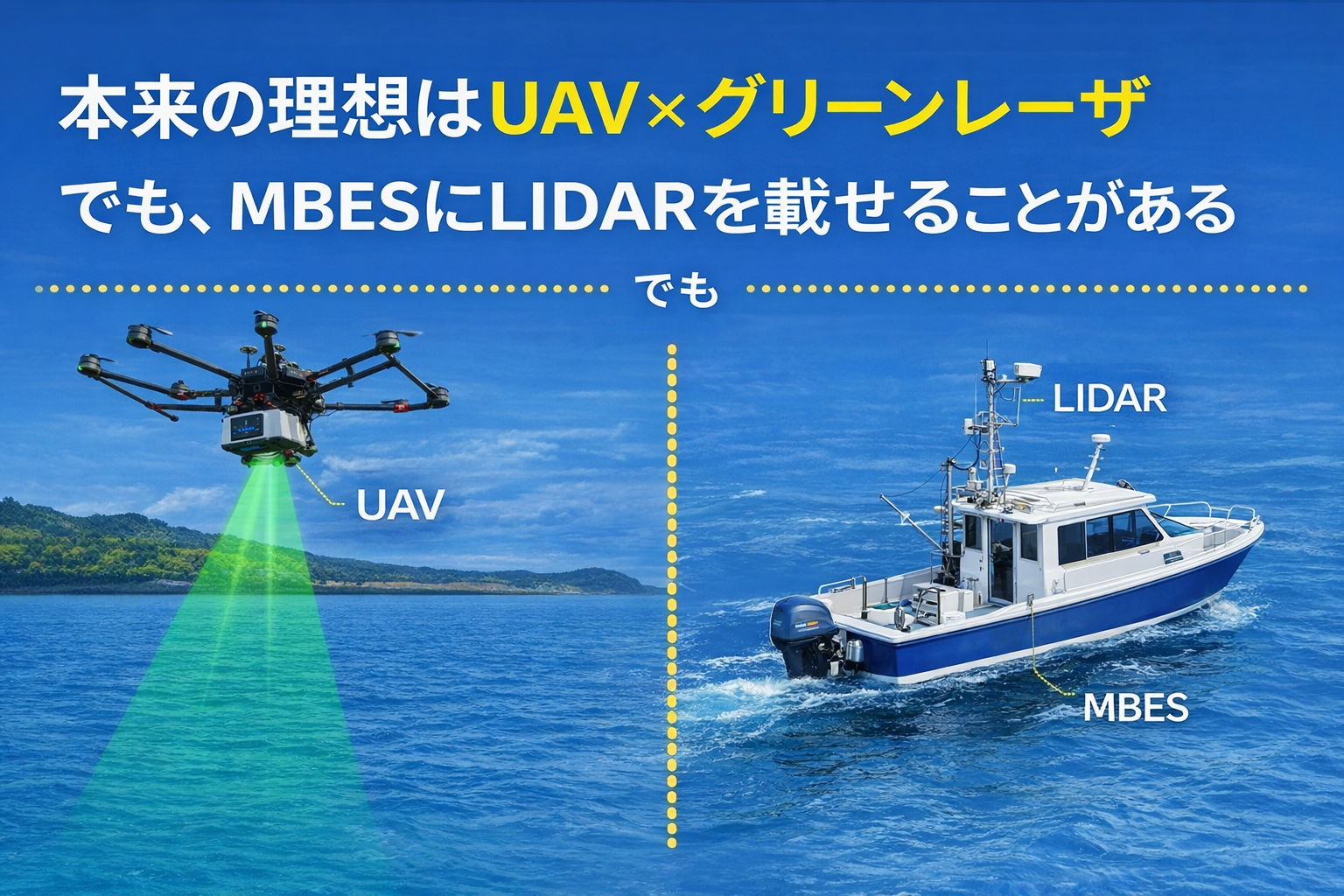
本来であれば、このような現場はUAVグリーンレーザとMBESの組み合わせが理想です。
気中部はレーザ、水中部は音響で受け持つことができ、条件が合えば、気中部と水中部のあいだに生じやすい空白も小さくしやすいからです。
ただし、実務はいつも理想どおりには進みません。
予算の都合でUAVグリーンレーザまで組めない現場もあります。
また、飛行規制エリアや周辺環境の制約により、UAVそのものが飛ばせないケースもあります。
こうした現場では、MBESにLIDARを追加で艤装する手法を取らざるを得ません。
今回は、この運用を実際にやって感じるメリットと限界、そして後処理を破綻させにくい考え方について整理します。
MBESにLIDARを載せる理由
MBESは水中地形の取得には非常に強い一方で、当然ながら陸上や護岸上部までは取得できません。
そこで船体にLIDARを追加すると、護岸天端、法肩、干潮時に露出した気中部など、水際より陸側の情報を補完しやすくなります。
この考え方自体は実務的で、有効な場面も多いです。
特に、陸と水の両方を一連で見たい現場では、MBES単独よりも地形のつながりを把握しやすくなります。
ただし、ここで重要なのは、今回のLIDARは近赤外であるという点です。
そのため、気中部の補完には役立っても、水際の濡れた部分や浅い水中部まで万能に埋められるわけではありません。

干潮時を狙っても、空白は残る
近赤LIDARを使う場合、少しでも露出部を増やすために干潮時を狙って計測するのは自然な発想です。
実際、露出した地盤や護岸上部は取りやすくなります。
しかし、現場で実感するのは、濡れている帯が思った以上に厄介だということです。
見た目は陸のようでも、水膜がある、しっとり濡れている、波がかぶる、泡立つ、といった条件が重なると、戻りが不安定になります。
その結果、気中部は取れても、水中部との境界にあたる帯だけがうまくつながらず、気中部と水中部のあいだに空白が残ることがあります。
ここはやってみると非常によく分かる部分で、期待ほどきれいには埋まりません。
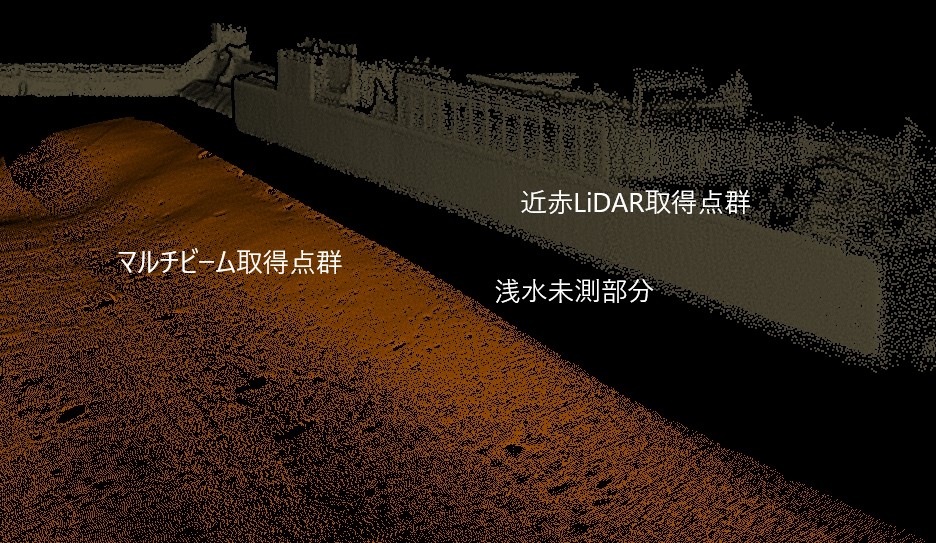
つまり、この手法は「全部をつなぐための方法」ではなく、取れる気中部を増やすための方法として理解したほうが実態に合っています。
本来の理想はUAVグリーンレーザ+MBES
この話をすると、やはり本命は何かという点に触れたくなります。
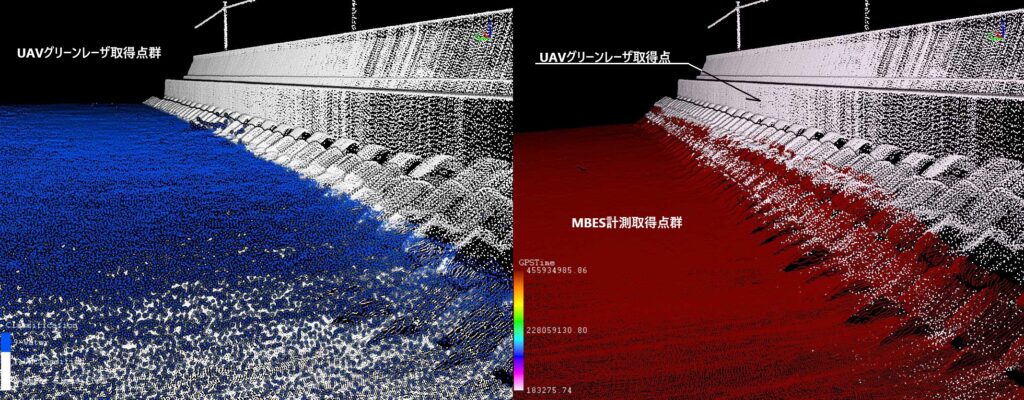
それはやはり、UAVグリーンレーザとMBESの組み合わせです。
気中部と水中部の両方を意識して計画できるため、干満帯の空白を小さくしやすく、全体として連続したモデルを作りやすいからです。
地形をきれいにつなぎたい、境界部までしっかり押さえたい、という意味では、この組み合わせがベストだと思います。
ただ、実務ではその理想を毎回選べるわけではありません。
予算が合わない。
飛行規制でUAVが使えない。
周辺条件的に飛ばしにくい。
そうなると、現場で取り得る現実解として、MBESにLIDARを載せる運用が出てきます。
つまり、この手法は理想解ではなく、制約条件の中で選ぶ次善策です。
そう割り切って考えると、期待値も成果評価も現実的になります。
センサーが2つなら、解析も2系統になる
ここは実際に運用してみないと見落としやすい点ですが、MBESにLIDARを追加すると、取得センサーが増えるだけでなく、解析も2系統になります。
今回のようにiWBMSとLIDARを組み合わせる場合、水中部はiWBMS側、気中部はLIDAR側で処理していくことになります。
当然ながら、精度管理も別々に考えなければいけません。
iWBMSはiWBMSで、姿勢やオフセット、パッチテストの確認が必要です。
LIDARはLIDARで、取付位置や角度、姿勢の整合を見なければいけません。
同じ船に積んで同時に取っていても、後処理の感覚としては「一体のセンサー」ではなく、別のセンサーを2台載せているに近いです。
特にパッチテストの考え方も独立しており、水中側が合っていても、LIDAR側まで自動で万事解決するわけではありません。
そのため、この複合運用は単純に機材を足しただけでは回らず、ある程度のスキルが必要になります。
舟形はCOG基準ではなく、iWBMSのIMU基準で作るほうが楽
こうした複合運用では、舟形の基準をどこに置くかが非常に重要です。
ここで大きなメリットがあるのが、COG基準ではなく、iWBMSのIMU基準で舟形を作る考え方です。
COG基準で舟形を組むと、船外機への艤装変更などがあるたびに、COGから各センサーまでのオフセットを現地で追い込み直す必要が出やすくなります。
現場ではこの作業が意外と面倒で、しかも基準がぶれる原因にもなります。
一方、iWBMSのIMU基準で統一しておけば、IMUとソナーの関係はレバーアーム値で正確に整理しやすいという大きなメリットがあります。
つまり、ソナー側の位置関係は、現地で毎回細かく測り直さなくても、処理系の基準を作りやすいということです。
特に船外機艤装のようなケースでは、この考え方がかなり効きます。
COG基準だと、COGからの距離を現場で追わないといけません。
しかし、IMU基準であれば、iWBMS側はレバーアーム情報を軸に整理しやすいため、現場での負担が軽くなります。
実務上、後処理を楽にする意味でも、少なくとも喫水とLIDARのオフセットを確実に押さえておくことが重要です。
ここが取れていれば、後工程の見通しがかなり良くなります。
この運用に期待しすぎないことが大事
MBESに近赤LIDARを追加艤装する方法は、確かに便利です。
気中部の補完量は増えますし、護岸上部や露出部の把握にも役立ちます。
ただし、それをもって「水際の空白が解消する」と期待しすぎると、現場後にがっかりすることになります。
大事なのは、この運用の役割を正しく理解することです。
水中はMBES。
気中部はLIDAR。
その中間の濡れた帯や境界部は、条件次第で残ることがある。
この整理で考えると、運用上の判断も成果の評価もぶれにくくなります。
まとめ
MBESにLIDARを追加艤装する手法は、現場によっては非常に有効です。
特に、予算や飛行規制の都合でUAVグリーンレーザが使えない場合には、現実的な選択肢になります。
ただし、近赤LIDARである以上、干潮時を狙っても、濡れた干満帯や水際の境界まで完全に埋めるのは難しく、気中部と水中部のあいだに空白が残ることがあります。
また、iWBMSとLIDARの複合運用では、センサーが2つあるぶん、解析も2系統となり、パッチテストや整合確認にもそれなりのスキルが必要です。
だからこそ、こうした現場では、何を理想として、何を現実解として選んでいるのかを最初に整理しておくことが大切です。
本来の理想はUAVグリーンレーザとMBESの組み合わせ。
しかし、予算や規制でそれが難しいなら、MBESにLIDARを追加艤装する。
そのうえで、舟形はCOG基準ではなくiWBMSのIMU基準で統一し、喫水とLIDARオフセットをきちんと押さえて後処理を安定させる。
この考え方が、実務ではかなり効いてくると感じています。
コメント